Китайські вчені навчили робота грати в теніс новим методом навчання
20 марта 2026
Китайські дослідники протестували новий, значно швидший і простіший метод навчання роботів грі в теніс, який, судячи з результатів, можна вважати проривом у машинному навчанні та реальному штучному інтелекті, повідомив ресурс New Atlas.

Джерело зображень: Zhang et al, Tsinghua university
У тенісі, як і в більшості інших видів спорту, технології захоплення рухів поки що не можуть зчитувати найменші нюанси кута зап’ястя під час удару по м’ячу, щоб виконувати його з необхідною точністю. Ситуація на тенісному корті занадто динамічна, щоб використовувати дистанційне управління, стверджують дослідники.
За словами дослідників, спроби витягти таку інформацію з багатокамерних відеозаписів за допомогою програмного забезпечення для навчання штучного інтелекту, такого як Vid2Player3D від Nvidia, є «складним процесом», який «може вимагати значних експертних знань і інженерних зусиль».
Натомість дослідники розробили систему LATENT, засновану на захопленні рухів, але лише для базових елементів техніки та призначену для роботи з неповними даними. У ході поточного експерименту дослідники використали дані захоплення рухів за п’ять годин, під час яких спортсмени демонстрували «примітивні навички» гри в теніс: удари правою та лівою рукою, бокові переміщення та перехресні кроки, виконувані на площі, що складає лише частину стандартного тенісного корту.
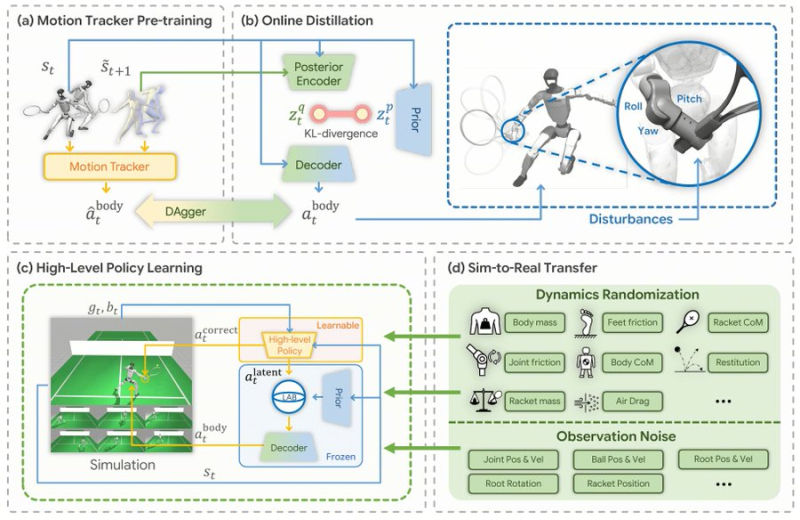
Дослідники обробили ці дані за допомогою камер, щоб створити репертуар людиноподібних «просторів руху», а потім завантажили ці базові навички в гуманоїдного робота G1 від Unitree, доступного за ціною $13,5 тис.
Використовуючи базові навички, робот мав за допомогою системи LATENT виконати поставлене завдання — побачити наближаючий тенісний м’яч і за допомогою ракетки перекинути його через сітку: «Успіх — це коли м’яч приземлиться на протилежній стороні корту в межах площі, обмеженої білими лініями».
Маючи базові навички ударів по м’ячу, робот міг експериментувати з усіма іншими деталями: кутами, часом, вибором рухів для різних ситуацій і моментами, коли слід виходити за межі навчальних рухів. Переважна частина навчання проходила з дуже високою швидкістю за допомогою симуляції.
В результаті G1 успішно відбивав удари правою рукою приблизно в 90 % випадків і удари лівою — трохи менше ніж в 80 %, причому його рухи виглядають спритними і плавними, як у справжнього тенісиста. Звісно, робот поки не готовий до змагальних матчів, але разом з тим він досяг значного прогресу в освоєнні гри.
Хоча це не зовсім та рутинна, монотонна робота, яку, як очікується, роботи виконуватимуть замість людей, завдяки розробці китайських дослідників вони зможуть швидко навчатися керувати своїм тілом в екстремальних умовах і справлятися зі складними та динамічними ситуаціями, що буде корисно в більш практичних завданнях.
Програмне забезпечення LATENT належить до категорії open source і доступне на GitHub.
Хочеш дізнатися більше — читай відгуки
← Вернуться на предыдущую страницу
Читайте также:
Співачка Кеті Перрі публічно розкритикувала адміністрацію Трампа через зухвалу витівку 27 июля 2026
Співачка Кеті Перрі публічно розкритикувала адміністрацію Трампа через зухвалу витівку: не збиралася "прославляти війну" Вона стала не першою "жертвою" Білого дому
Пожежні Франції борються з вогнем поблизу Бордо 27 июля 2026
Вогонь наблизився приблизно на 15 кілометрів до Бордо, одного з головних туристичних центрів регіону.
В Німеччині літак упав на будинок: двоє загиблих 27 июля 2026
Мешканців будинку, в дах якого врізався літак внаслідок падіння, якраз не було вдома, але загинули пілот і пасажир.
