Замість тисяч датчиків одна дешева камера — роботів навчили відчувати пальцями
5 июля 2026
Розробники з Лондонського університету королеви Марії (Queen Mary University of London) представили м’який тактильний сенсор, який дозволяє роботам фактично бачити дотик: тиск і деформація внутрішньої поверхні м’якого кінчика датчика миттєво перетворюються на кольорову картину, що зчитується звичайною камерою. Таким чином, без складних алгоритмів робот моментально отримує вичерпну інформацію про те, до чого він доторкнувся.

Джерело зображення: ШІ-генерація ChatGPT/3DNews
Не секрет, що дотик дається роботам з труднощами. У руці людини понад 10 тисяч механорецепторів. Надати роботові подібну тактильну чутливість поки що практично неможливо: або не вистачає датчиків, або потрібні занадто складні алгоритми та обчислювальні потужності.
Британські вчені вчинили хитро — вони запропонували безпосередньо зчитувати деформацію м’якого датчика в місці дотику як дані про рельєф поверхні та її механічні властивості. Ключовий елемент пристрою — еластичний бреггівський відбивач, заключений між двома шарами м’якого силікону.
При натисканні матеріал деформується в залежності від поверхні, до якої його притискають, і формує певну палітру кольорів — просторово розподілений кольоровий візерунок не за рахунок якогось барвника, а в силу зміни оптичного відгуку своєї структури. Ці кольорові візерунки несуть інформацію про контакт, тиск і деформацію, тому навіть проста USB-камера може зчитувати карту навантаження безпосередньо, без щільної сітки датчиків фізичного дотику, складної архітектури та надмірних алгоритмів.
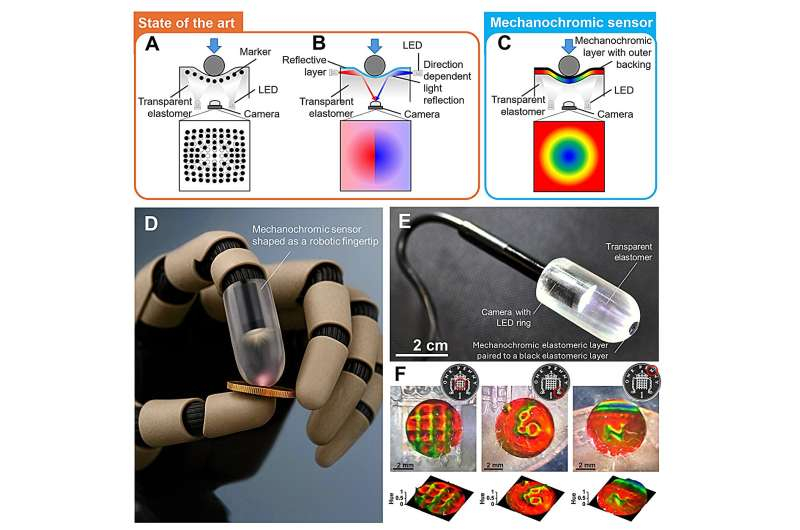
Джерело зображення: Queen Mary University of London
Запропоноване рішення дозволяє забути про необхідність компромісу між роздільною здатністю та швидкістю. Класичні тактильні датчики — ємнісні, резистивні або п’єзоелектричні — працюють в реальному часі, але обмежені розміром чутливих елементів, відстанню між ними, разводкою та взаємними перешкодами, що рідко виводить їх за межі роздільної здатності менше 1 мм. Тактильні датчики на основі машинного зору здатні бачити більш дрібні деталі, але вимагають серйозних обчислювальних ресурсів. Запропоноване британцями рішення дозволяє розрізняти елементи поверхні з кроком близько 100 мкм, причому в реальному режимі часу без зайвого навантаження на процесор.
Розробка допоможе наділити роботизовані маніпулятори високою тактильною чутливістю для виробничих, медичних і побутових потреб. Така «шкіра» може бути встановлена на захвати для збору мікрокомпонентів, коли навіть невелике перевищення тиску здатне пошкодити деталь. У випадку з протезами це надасть багатий тактильний зворотний зв’язок, а в хірургічних роботах допоможе розрізняти здорові та пошкоджені тканини на дотик.
Хочеш дізнатися більше — читай відгуки
← Вернуться на предыдущую страницу
Читайте также:
В Італії готують пониження віку кримінальної відповідальності до 14 років 25 июля 2026
Підлітки можуть опинитися під кримінальними звинуваченнями з 14-річного віку і суддям більше не потрібно буде доводити, чи правопорушник усвідомлював свої дії.
Рецептом корисного і швидкого сніданку на кожен день поділилася лікар-терапевт 25 июля 2026
Багато хто воліє не витрачати час на приготування сніданку, а у деяких перший прийом їжі…
Названі продукти, які пригнічують діяльність мозку 25 июля 2026
Вчені звернули увагу на раціон людей з деменцією. Дослідники всього світу працюють над вирішенням проблеми…
