Японці створили анатомічно точну копію робопса з м'язами і без шкіри
1 января 2026
Усі провідні розробники чотириногих роботів для приведення в дію кінцівок робопсів зробили ставку на електродвигуни і досягли успіхів у рухливості та маневреності таких платформ. Тим часом справжня анатомія людей і тварин мільйони років адаптувалася для руху на інших принципах, і у роботів є чому в неї повчитися. М'язова система гнучкіша і більш універсальна, що також може допомогти в розвитку роботизованих систем.
Джерело зображення: Advanced Robotics Research 2025
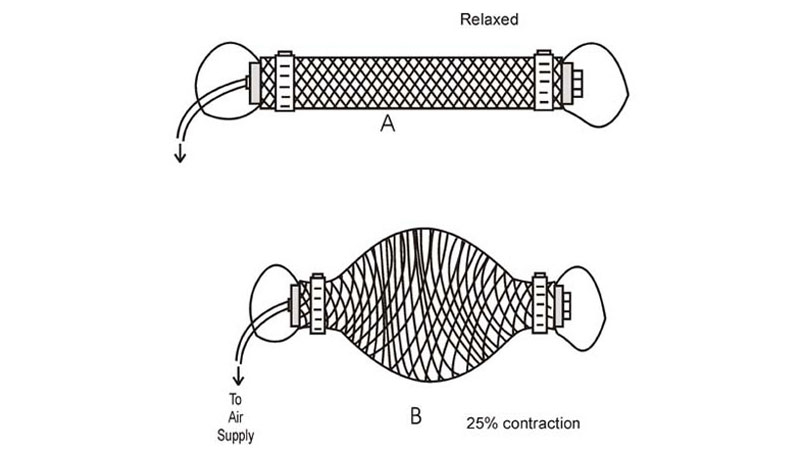
Цікаве рішення для імітації м'язів більше 70 років тому придумав Джозеф Маккібен (Joseph McKibben). Його розробка була створена для ортопедії і добре лягла на завдання робототехніки. Актуатори або пневматичні приводи Маккібена представляють собою еластичні трубки в жорсткій обплетці, яка не дає їм багато свободи, але зате імітує скорочення м'язів при закачуванні в трубки повітря або рідин. Японські інженери скористалися цим і максимально точно відтворили анатомію кінцівок собаки, щоб забезпечити роботу пересування.
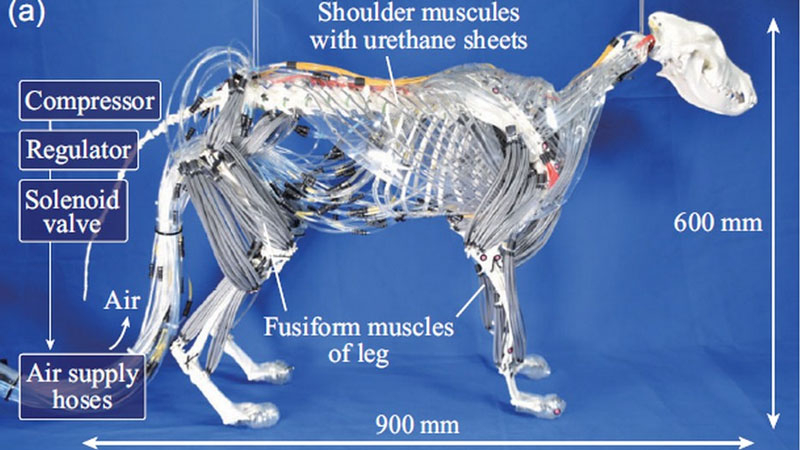
Особливу увагу розробники приділили відтворенню будови плечового поясу: як і у справжньої собаки, кінцівки в цьому роботові з'єднані з тулубом виключно м'язами, без суглобів. З боку це виглядає жахливо — ніби з справжньої тварини живцем здерли шкіру, але прототип вже продемонстрував стійке рух по прямій.
У конструкції японського прототипу використано 48 пневматичних штучних м'язів: по 15 на кожну передню кінцівку і по 9 — на задні. Оскільки передні лапи кріпилися до тулуба тільки за рахунок м'язів, це збільшило рухливість і довжину кроку. Однак відсутність пасивних стабілізуючих структур, таких як суглобові мішки і зв'язки, не дозволяє роботові самостійно утримувати вагу свого тіла. Тому на випробуваннях він пересувався, спираючись на допоміжну візок, хоча послідовність активації м'язів і характер рухів були досить близькі до природних.
Плани подальшої роботи включають створення суглобних елементів і м'яких тканин, що дозволить роботові відмовитися від візка і повноцінно рухатися. Також інженери мають намір оптимізувати пневмосистему для прискорення реакції м'язів і підвищення швидкості ходьби. Подібні м'язово-скелетні роботи важливі не тільки для робототехніки, але й для біомедичних досліджень: вони можуть допомогти в вивченні рухових можливостей тварин і при створенні «природних» протезів.
Додамо, не так давно польський стартап Clone Robotics показав анатомічно точно відтвореного людино подібного робота. Він виглядає не менш жахливо, ніж японський робо-пес. Але може бути, це справжнє майбутнє робототехніки?
Хочеш дізнатися більше — читай відгуки
← Вернуться на предыдущую страницу
Читайте также:
Нарколог пояснив шкоду вживання алкоголю перед сном 2 августа 2026
Перед сном категорично заборонено вживати алкогольні напої. Про це попередив психіатр-нарколог Віталій Холдін. За його…
У момент удару РФ біг рятувати травмованих: в Києві загинув 22-річний поліцейський Єгор Терехін 2 августа 2026
У момент удару РФ біг рятувати травмованих: в Києві загинув 22-річний поліцейський Єгор Терехін Вічна пам'ять і слава Герою
Пентагон запросив $18 млрд на екстрене посилення ППО 2 августа 2026
Із цих коштів $5,57 млрд планується асигнувати на перехоплювачі для зенітних комплексів Patriot.
