Роботи навчилися копіювати людські навички, просто спостерігаючи за людьми
20 мая 2026
Людина може навчатися певним діям як у інших людей, так і, в окремих випадках, у тварин. Роботів можна програмувати на певні послідовності дій, а повторення навичок людини та інших машин — задача більш складна, оскільки роботи можуть відрізнятися за будовою. Рішення цієї задачі запропонували інженери Федеральної політехнічної школи Лозанни (EPFL, Швейцарія).

Джерело зображень: actu.epfl.ch
Вчені Лабораторії алгоритмів і систем навчання (LASA) при EPFL розробили нову технологію, яка дозволяє роботам імітувати людську діяльність, що звільняє операторів від необхідності налаштовувати код під робота кожного типу. У сфері досліджень і в промисловості така система забезпечить значну економію коштів і часу. Кінематичний інтелект — новий підхід до навчання на основі демонстрації (Learning-from-Demonstration, LfD) — дозволяє роботам, що мають різну будову, здобувати нові навички, спостерігаючи за однією й тією ж демонстрацією, яку проводить виступаючий в ролі вчителя людина.
Від існуючих рішень кінематичний інтелект відрізняється тим, що спостережувані дії перетворюються в стратегію, що адаптується до індивідуальних обмежень суглобів і рухів кожного робота, а також до інших його фізичних обмежень і переваг. Після навчання на кількох демонстраціях або навіть на одній, виступаючі в ролі учнів роботи за допомогою «глобально стабільної динамічної системи» успішно виконали нові завдання. «Кожен робот оволодів різними етапами завдання, і система успішно працювала навіть при зміні розподілу кроків. Кожен робот інтерпретує один і той же навик по-своєму, але завжди в безпечних і виконуваних межах», — прокоментував проект один з його авторів Ститхпрагья Гупта (Sthithpragya Gupta).
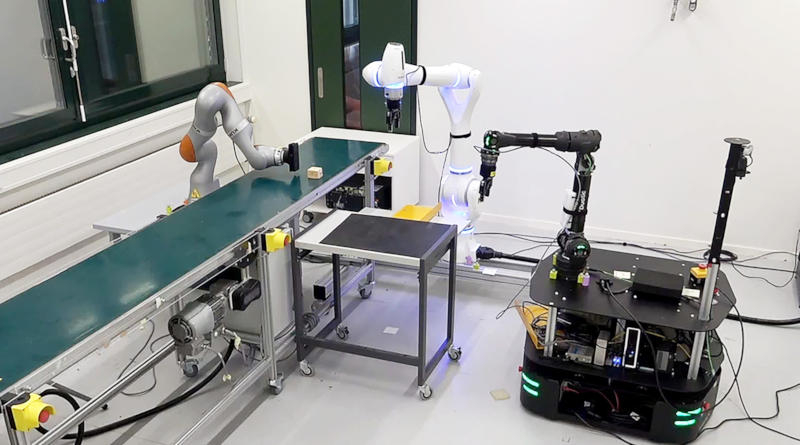
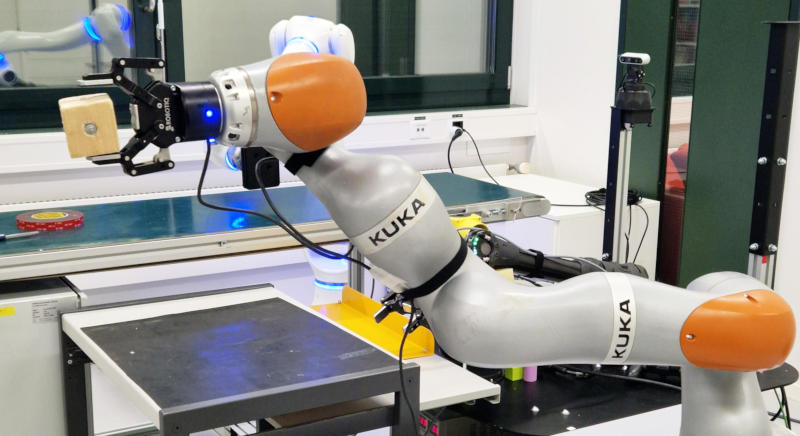
Робота над проектом почалася з того, що дослідники EPFL здійснили захоплення рухів людей, які встановлювали, штовхали, кидали предмети або виконували з ними інші дії. Далі вони побудували систему класифікації фізичних обмежень роботів, зафіксувавши межі рівноваги та діапазон рухів суглобів, і об'єднали цю систему з даними захоплення рухів у процесі розробки власної системи спостереження та адаптаційного навчання роботів. У ході експериментів після спостереження за людьми три різних комерційних роботи навчилися переміщати дерев'яні блоки з конвеєрної стрічки на робочу платформу, ставити їх на столи та кидати в контейнери.
На наступному етапі дослідники хочуть навчити роботів виконувати завдання не за заданим людиною зразком, а за словесними описами: «користувач пропонує ідею та бажану поведінку, а робот має подбати про все інше».
Хочеш дізнатися більше — читай відгуки
← Вернуться на предыдущую страницу
Читайте также:
Європі загрожує нестача газу взимку - ЗМІ 25 июля 2026
Глобальна боротьба за скраплений природний газ загрожує зірвати стратегію Європи відкладати зимові закупівлі до повторного відкриття Ормузької протоки.
Виявлено спосіб непомітної підміни додатків для Apple macOS на шкідливі 25 июля 2026
Додатки для Apple macOS, які завантажувалися з джерел, відмінних від App Store, і запускалися хоча б раз, можна підміняти шкідливими двійниками, стверджують двоє дослідників у сфері кібербезпеки, які поставили під сумнів ефективність захисної технології.
Стали відомі 4 способи визначити свіжість яєць 25 июля 2026
Яйця вранці у вигляді омлету або начинки для тосту є одним з варіантів корисного сніданку.…
